Projects
Protosphere - A GPU-Assisted Prototype Guided Sphere Packing Algorithm for Arbitrary Objects
Project member: Prof. Dr. Gabriel Zachmann, Dr. René Weller
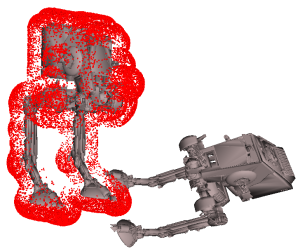
We present a new algorithm that is able to efficiently compute a space filling sphere packing for arbitrary objects.
It is independent of the object's representation and can be easily extended to higher dimensions.
The basic idea is very simple and related to prototype based approaches known from machine learning.
This approach directly leads to a parallel algorithm that we have implemented using CUDA.
As a byproduct, our algorithm yields an approximation of the object's medial axis.
This project is partially funded by BMBF grant Avilus / 01 IM 08 001 U.
For further information please visit our project homepage.
Reference:
[BiBTeX]
E-Mail: rene.weller@collision-detection.com
Haptesha - A Collaborative Multi-User Haptic Workspace
Project member: Prof. Dr. Gabriel Zachmann, Dr. René Weller
Haptesha is a haptic workspace that allows high fidelity two-handed
multi-user interactions in scenarios containing a large number of
dynamically simulated rigid objects and a polygon count that is
only limited by the capabilities of the graphics card.
This project is partially funded by BMBF grant Avilus / 01 IM 08 001 U.
For further information please visit our project homepage.
Awards:
Winner of RTT Emerging Technology Contest 2010
Reference:
[BiBTeX]
E-Mail: rene.weller@collision-detection.com
Inner Sphere Trees
Project member: Prof. Dr. Gabriel Zachmann, Dr. René Weller
Collision detection between rigid objects plays an important
role in many fields of robotics and computer graphics, e.g. for
path-planning, haptics, physically-based simulations, and medical
applications. Today, there exist a wide variety of freely available
collision detection libraries and nearly all of them are able
to work at interactive rates, even for very complex objects
Most collision detection algorithms dealing with rigid objects use
some kind of bounding volume hierarchy (BVH). The main idea
behind a BVH is to subdivide the primitives of an object hierarchically
until there are only single primitives left at the leaves.
BVHs guarantee very fast responses at query time, as long as no
further information than the set of colliding polygons is required
for the collision response. However, most applications require
much more information in order to solve or avoid the collisions.
One way to do this is to is to compute
repelling forces based on the penetration depth. However, there
is no universally accepted definition of the penetration depth between
a pair of polygonal models. Mostly, the minimum
translation vector to separate the objects is used, but this may
lead to discontinuous forces.
Moreover, haptic rendering requires update rates of at least 200 Hz, but
preferably 1 kHz to guarantee a stable force feedback. Consequently,
the collision detection time should never exceed 5 msec.
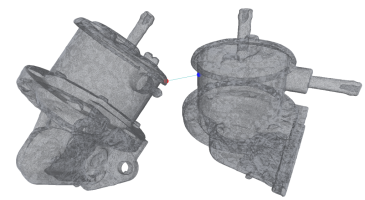
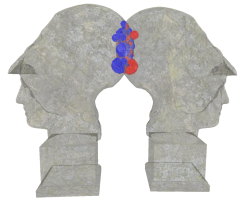
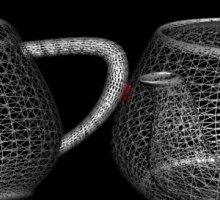
We present a novel geometric data structure for approximate
collision detection at haptic rates between rigid objects. Our data
structure, which we call inner sphere trees, supports both proximity
queries and the penetration volume; the latter is related to
the water displacement of the overlapping region and, thus, corresponds
to a physically motivated force. Our method is able to compute continuous
contact forces and torques that enable a stable rendering of
6-DOF penalty-based distributed contacts.
The main idea of our new data structure is to bound the object
from the inside with a bounding volume hierarchy, which can be
built based on dense sphere packings.
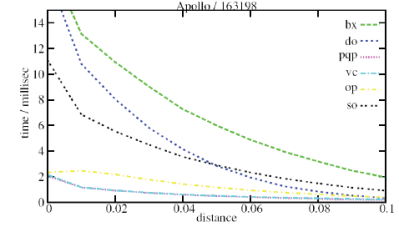
The results show performance at haptic rates both for proximity
and penetration volume queries for models consisting of
hundreds of thousands of polygons.
This project is partially funded by DFG grant ZA292/1-1 and BMBF grant Avilus / 01 IM 08 001 U.
For further information please visit our project homepage.
Reference:
[BiBTeX]
[BiBTeX]
[BiBTeX]
[BiBTeX]
[BiBTeX]
E-Mail: rene.weller@collision-detection.com
Open-Source Benchmarking Suite for Collision Detection Libraries
Project member: Prof. Dr. Gabriel Zachmann, Dr. René Weller
Fast algorithms for collision detection between polygonal
objects are needed in many fields of computer science. In nearly all of these applications, collision
detection is the computational bottleneck. In order
to gain a maximum speed of applications, it is essential
to select the best suited algorithm.
The design of a standardized benchmarking suite
for collision detection would make fair comparisons
between algorithms much easier. Such a benchmark
must be designed with care, so that it includes a broad
spectrum of different and interesting contact scenarios.
However, there are no standard benchmarks available
to compare different algorithms. As a result, it is nontrivial
to compare two algorithms and their implementations.
In this project, we developed a simple benchmark procedure
which eliminates these effects. It has been kept
very simple so that other researchers can easily reproduce
the results and compare their algorithms.
Our benchmarking suite is flexible, robust, and it
is easy to integrate other collision detection libraries.
Moreover, the benchmarking suite is freely available
and can be downloaded here together with a set of objects
in different resolutions that cover a wide range of possible
scenarios for collision detection algorithms, and a
set of precomputed test points for these objects.
For further information please visit our project homepage.
Reference:
[BiBTeX]
[BiBTeX]
[BiBTeX]
E-Mail: rene.weller@collision-detection.com
Open-Source Collision Detection Library
Project member: Prof. Dr. Gabriel Zachmann, Dr. René Weller
Fast and exact collision detection between a pair of graphical objects
undergoing rigid motions is at the core of many simulation and planning
algorithms in computer graphics and related areas (for instance, automatic
path finding, or tolerance checking).
In particular, virtual reality applications such as virtual prototyping
or haptic rendering
need exact collision detection at interactive speed for very complex,
arbitrary ``polygon soups''.
It is also a fundamental problem of dynamic simulation of rigid bodies,
simulation of natural interaction with objects, haptic rendering, path
planning, and CAD/CAM.
In order to provide an easy-to-use library for other researchers and
open-source projects, we have implemented our algorithms in an
object-oriented library, which is based on OpenSG.
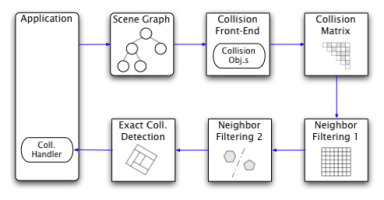
It is structured as a pipeline (proposed by [Zach01a]), contains
algorithms for the broad phase (grid, convex hull test, separating planes),
and the narrow phase (Dop-Tree, BoxTree, etc.).
For further information please visit our project homepage.
Reference:
[BiBTeX]
[BiBTeX]
[BiBTeX]
[BiBTeX]
[BiBTeX]
[BiBTeX]
[BiBTeX]
[BiBTeX]
E-Mail: rene.weller@collision-detection.com
Kinetic Bounding Volume Hierarchies for Deformable Objects
Project member: Prof. Dr. Gabriel Zachmann, Dr. René Weller
Bounding volume hierarchies for geometric objects are
widely employed in many areas of computer science to accelerate
geometric queries, e.g., in computer graphics for ray-tracing,
occlusion culling and collision detection.
Usually, a bounding volume hierarchy is constructed in
a pre-processing step which is suitable as long as the objects are rigid.
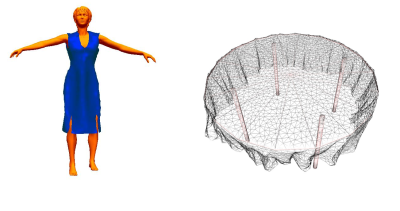
However, deformable objects play an important role, e.g., for
creating virtual environments in medical applications or cloth simulation.
If such an object deforms, the pre-processed hierarchy becomes invalid.
In order to still use this method for deforming objects
as well, it is necessary to update the hierarchies after the deformation
happened.
In this project, we utilize the framework of event-based kinetic data
structures for designing
and analyzing new algorithms for updating bounding volume hierarchies undergoing arbitrary deformations.
In addition, we apply our new algorithms and data structures to
the problem of collision detection.
Reference: [BiBTeX][publication][Book]
E-Mail: rene.weller@collision-detection.com
Natural Interaction in Virtual Environments
Project member: Prof. Dr. Gabriel Zachmann, Dr. René Weller
Virtual reality (VR) promised to allow users to experience
and work with three-dimensional computer-simulated
environments just like with the real world.
Currently, VR offers a lot of efficient
and more or less intuitive interaction paradigms.
However, users still cannot interact with virtual environments
in a way they are used to in the real world. In particular,
the human hand, which is our most versatile tool, is still only very
crudely represented in the virtual world. Natural manual operations,
such as grasping, pinching, pushing, etc., cannot be performed with the
virtual hand in a plausible and efficient way in real-time.
Therefore, the goal of this project is to model and simulate the real human
hand by a virtual hand. Such a virtual hand is controlled by the user of a
virtual environment via hand tracking technologies, such as a CyberGlove or
camera-based hand tracking (see our companion project).
Then, the interaction between such a human hand model and the graphical
objects in the virtual environment is to be modelled and simulated, such that
the afore mentioned natural hand operations can be performed efficiently.
Note that our approach is not to try to achieve physical correctness of the
interactions but to achieve real-time under all circumstances
while maintaining physical plausbility.
In order to achieve our goal, we focus our research on deformable collision
detection, physically-based simulation, and realistic animation of the virtual
hand.
This technology will have a number of very useful applications, which
can, until now, not be performed effectively and satisfactorily. Some of them
are virtual assembly simulation, 3D sketching, medical surgery training, or
simulation games.
This project is partially funded by DFG grant ZA292/1-1.
Reference: [BiBTeX][BiBTeX][BiBTeX]
E-Mail: rene.weller@collision-detection.com
Shader Maker
Markus Kramer, Dr. Rene Weller, Pro. Dr. Gabriel Zachmann
Actually, this is not a regular publication, but a software release.
Shader Maker is a simple, cross-platform GLSL editor.
It works on Windows, Linux, and Mac OS X.
It provides the basics of a shader editor, such that students can get
started with writing their own shaders as quickly as possible.
This includes: syntax highlighting in the GLSL editors; geometry shader
editor (as well as vertex and fragment shader editors, of course);
interactive editing of the uniform variables;
light source parameters; pre-defined simple shapes (e.g., torus et al.)
and a simple OBJ loader; and a few more.
For download and further information please visit our project website
|