Publications
kDet: Parallel Constant Time Collision Detection
for Polygonal Objects
Rene Weller, Nicole Debowski and Gabriel Zachmann
We define a novel geometric predicate and a class of objects that enables us to prove a linear bound on the number of intersecting
polygon pairs for colliding 3D objects in that class. Our predicate is relevant both in theory and in practice: it is easy to check
and it needs to consider only the geometric properties of the individual objects - it does not depend on the configuration of a
given pair of objects. In addition, it characterizes a practically relevant class of objects: we checked our predicate on a large
database of real-world 3D objects and the results show that it holds for all but the most pathological ones.
Our proof is constructive in that it is the basis for a novel collision detection algorithm that realizes this linear complexity also
in practice. Additionally, we present a parallelization of this algorithm with a worst-case running time that is independent of the
number of polygons. Our algorithm is very well suited not only for rigid but also for deformable and even topology-changing
objects, because it does not require any complex data structures or pre-processing.
We have implemented our algorithm on the GPU and the results show that it is able to find in real-time all colliding polygons
for pairs of deformable objects consisting of more than 200k triangles, including self-collisions.
Published:
Eurographics 2017, Lyon, France, April 24 - 28, 2017.
[BibTex]
Files:
Paper
Talk
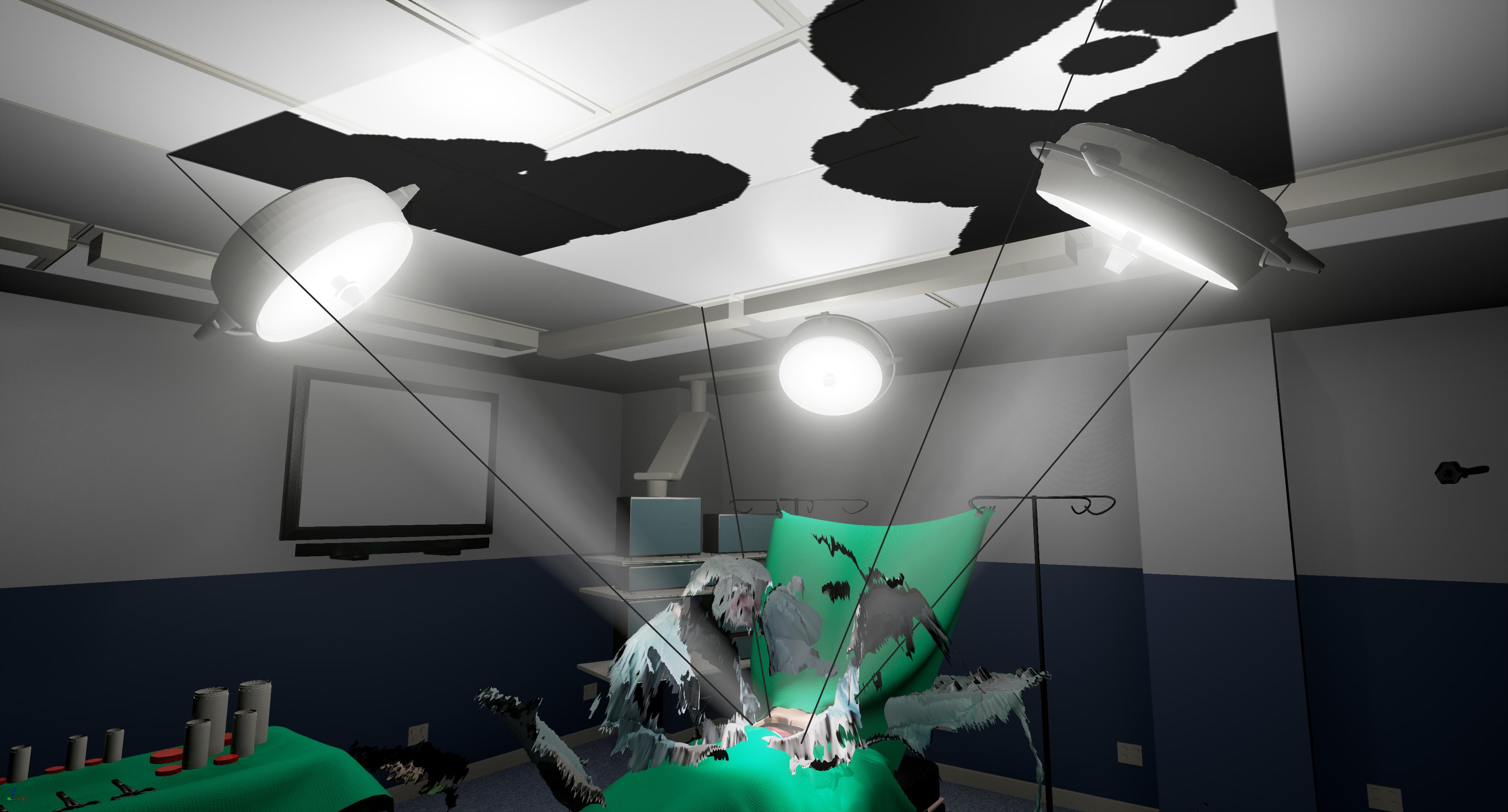
Optimized Positioning of Autonomous Surgical Lamps
Jörn Teuber, Rene Weller, Ron Kikinis, Karl-Jürgen Oldhafer, Michael J. Lipp, Gabriel Zachmann
We consider the problem of finding automatically optimal positions of surgical lamps throughout the whole surgical procedure, where we assume that future lamps could be robotized. We propose a two-tiered optimization technique for the real-time autonomous positioning of those robotized surgical lamps. Typically, finding optimal positions for surgical lamps is a multi-dimensional problem with several, in part conflicting, objectives, such as optimal lighting conditions at every point in time while minimizing the movement of the lamps in order to avoid distractions of the surgeon. Consequently, we use multi-objective optimization (MOO) to find optimal positions in real-time during the entire surgery.
Due to the conflicting objectives, there is usually not a single optimal solution for such kinds of problems, but a set of solutions that realizes a Pareto-front. When our algorithm selects a solution from this set it additionally has to consider the individual preferences of the surgeon. This is a highly non-trivial task because the relationship between the solution and the parameters is not obvious. We have developed a novel meta-optimization that considers exactly this challenge. It delivers an easy to understand set of presets for the parameters and allows a balance between the lamp movement and lamp obstruction. This meta-optimization can be pre-computed for different kinds of operations and it then used by our online optimization for the selection of the appropriate Pareto solution.
Both optimization approaches use data obtained by a depth camera that captures the surgical site but also the environment around the operating table. We have evaluated our algorithms with data recorded during a real open abdominal surgery. It is available for use for scientific purposes. The results show that our meta-optimization produces viable parameter sets for different parts of an intervention even when trained on a small portion of it.
Published:
SPIE Medical Imaging
Orlando, FL, USA, February 11 - 16, 2017. [BibTex]
Copyright 2017 Society of Photo Optical Instrumentation Engineers. One print or electronic copy may be made for personal use only. Systematic electronic or print reproduction and distribution, duplication of any material in this paper for a fee or for commercial purposes, or modification of the content of the paper are prohibited.
http://dx.doi.org/10.1117/12.2256029
Files:
Paper
Talk
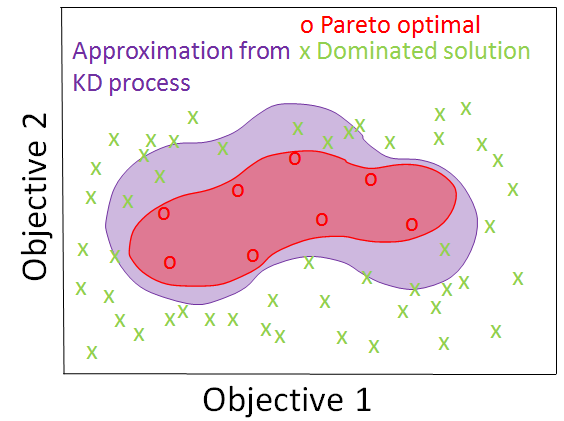
Knowledge Discovery for Pareto based Multiobjective Optimization in Simulation
Patrick Lange, Rene Weller, Gabriel Zachmann
We present a novel knowledge discovery approach for automatic feasible design space approximation and parameter optimization in arbitrary
multiobjective blackbox simulations. Our approach does not need any supervision of simulation experts.
Usually simulation experts conduct simulation experiments
for a predetermined system specification by manually reducing the complexity and number of simulation runs by varying input parameters through
educated assumptions and according to prior defined goals. This
leads to a error-prone trial-and-error approach for determining suitable parameters for successful simulations.
In contrast, our approach autonomously discovers unknown relationships in model behavior and approximates the feasible design space. Furthermore,
we show how Pareto gradient information can be obtained from this design space approximation
for state-of-the-art optimization algorithms.
Our approach gains its efficiency from a novel spline-based sampling of the parameter space in combination within novel forest-based simulation dataflow analysis.
We have applied our new method to several artificial and real-world scenarios and the results show that our approach is able to discover relationships
between parameters and simulation goals. Additionally, the computed multiobjective solutions are close to the Pareto front.
Published:
ACM SIGSIM PADS , Banff, AB, Canada, May 15 - 18, 2016
[BibTex]
Files:
Paper
Talk
GraphPool: A High Performance Data Management for 3D Simulations
Patrick Lange, Rene Weller, Gabriel Zachmann
We present a new graph-based approach called GraphPool for the generation, management and distribution of simulation states for
3D simulation applications.
Currently, relational databases are often used for this task in simulation applications. In contrast,
our approach combines novel wait-free nested hash map techniques with traditional graphs which results in a schema-less, in-memory, highly efficient data management.
Our GraphPool stores static and dynamic parts of a simulation model, distributes changes caused by the simulation
and logs the simulation run. Even more, the GraphPool supports sophisticated query types of traditional relational databases.
As a consequence, our GraphPool overcomes the associated drawbacks of relational database technology for sophisticated 3D simulation applications.
Our GraphPool has several advantages compared to other state-of-the-art decentralized methods,
such as persistence for simulation state over time, object identification, standardized interfaces for software components
as well as a consistent world model for the overall simulation system.
We tested our approach in a synthetic benchmark scenario but also in real-world use cases. The results show that it outperforms state-of-the-art relational databases by several orders of magnitude.
Published:
ACM SIGSIM PADS , Banff, AB, Canada, May 15 - 18, 2016
[BibTex]
Files:
Paper
Talk
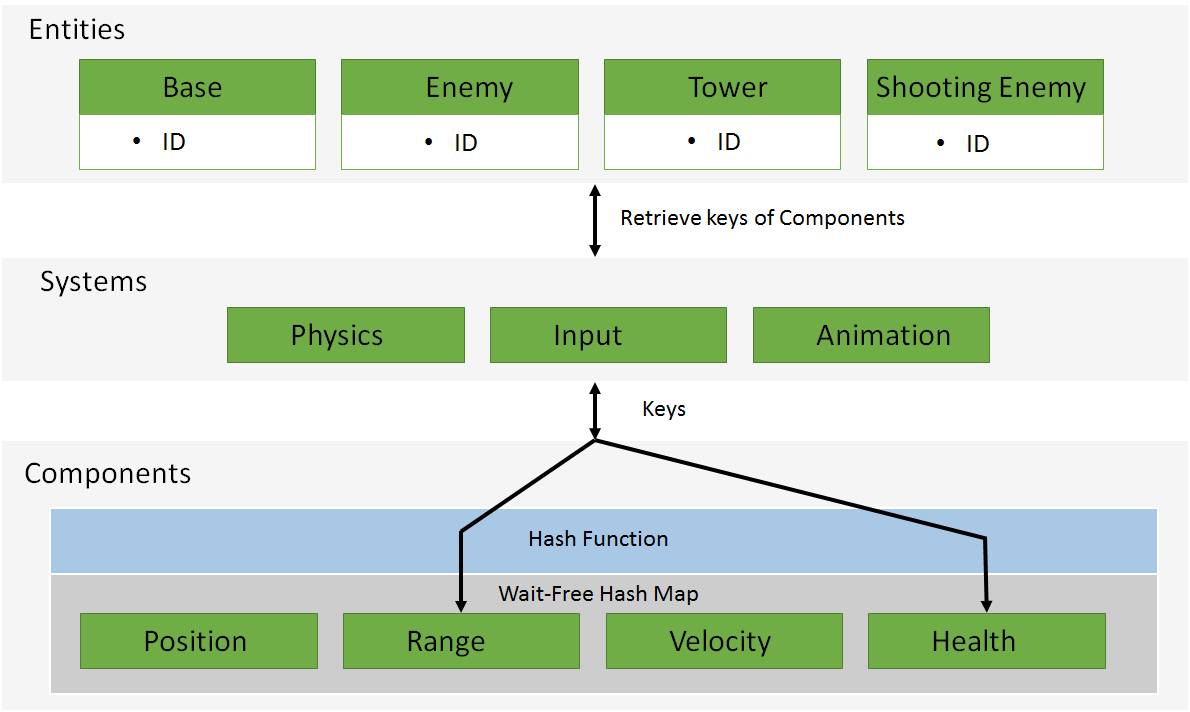
Wait-Free Hash Maps in the Entity-Component-System Pattern for Realtime Interactive Systems
Patrick Lange, Rene Weller, Gabriel Zachmann
In the past, the Entity-Component-System (ECS) pattern has become
a major design pattern used in modern architectures for Realtime Interactive Systems (RIS).
In this paper we introduce high performance wait-free hash maps for the
System access of Components within the ECS pattern. This allows non-locking read and
write operations, leading to a highly responsive low-latency data access while maintaining
a consistent data state.
Furthermore, we present centralized as well as decentralized approaches for reducing the
memory demand of these memory-intensive wait-free hash maps for diverse RIS applications.
Our approaches gain their efficiency by Component-wise queues which use atomic markup
operations for fast memory deletion.
We have implemented our new method in a current RIS and the results show that our approach
is able to efficiently reduce the memory usage of wait-free hash maps very effectively by
more than a factor of ten while still maintaining their high performance. Furthermore, we
derive best practices from our numerical results for different use cases of wait-free hash
map memory management in diverse RIS applications.
Published:
IEEE VR: 9th Workshop on Software Engineering and Architectures for Realtime Interactive Systems SEARIS 2016 , Greenville, SC, USA, March 19 - 23, 2016
[BibTex]
Files:
Paper
Talk
Kinaptic - Techniques and Insights for Creating Competitive
Accessible 3D Games for Sighted and Visually Impaired Users
Andreas Grabski, Toni Toni, Tom Zigrand, Rene Weller, Gabriel Zachmann
We present the first accessible game that allows a
fair competition between sighted and blind people in a shared
virtual 3D environment.We use an asymmetric setup that allows
touchless interaction via Kinect, for the sighted player, and
haptic, wind, and surround audio feedback, for the blind player.
We evaluated our game in an in-the-wild study. The results
show that our setup is able to provide a mutually fun game
experience while maintaining a fair winning chance for both
players. Based on our study, we also suggest guidelines for
future developments of games for visually impaired people that
could help to further include blind people into society.
Published:
Haptics Symposium 2016, Philadelphia, PA, USA, April 8 - 11, 2016
[BibTex]
Files:
Paper
Talk
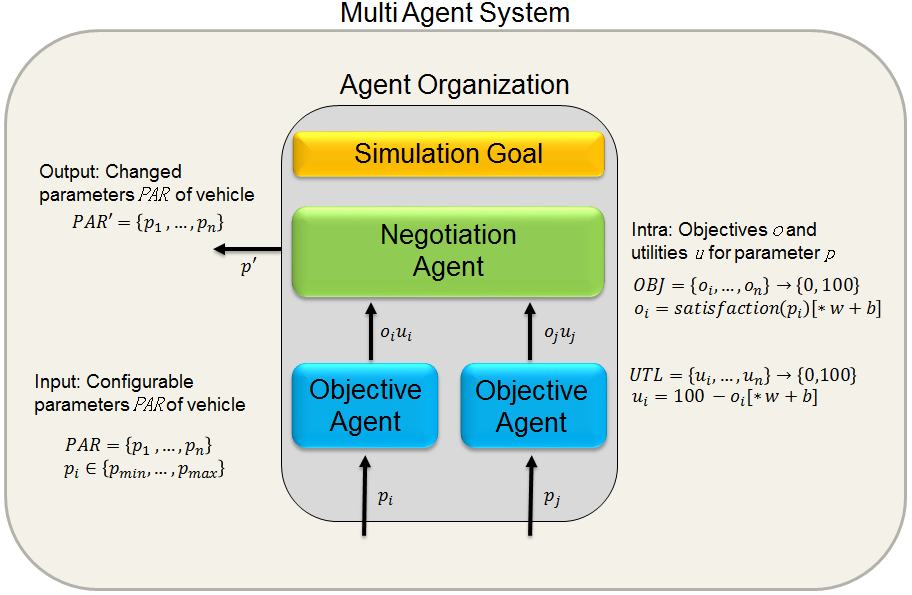
Multi Agent System Optimization in Virtual Vehicle Testbeds
Patrick Lange, Rene Weller, Gabriel Zachmann
Modelling, simulation, and optimization play a crucial role in the development and testing of autonomous vehicles. The ability to compute, test, assess, and debug suitable
configurations reduces the time and cost of vehicle development. Until now, engineers are forced to manually change vehicle configurations in virtual testbeds in order to react
to inappropriate simulated vehicle performance. Such manual adjustments are very time consuming and are also often made ad-hoc, which decreases the overall quality of the vehicle
engineering process. In order to avoid this manual adjustment as well as to improve the overall quality of these adjustments, we present a novel comprehensive approach to modelling,
simulation, and optimization of such vehicles. Instead of manually adjusting vehicle configurations, engineers can specify simulation goals in a domain specific modelling language.
The simulated vehicle performance is then mapped to these simulation goals and our multi-agent system computes for optimized vehicle configuration parameters in order to satisfy these goals.
Consequently, our approach does not need any supervision and gives engineers visual feedback of their vehicle configuration expectations. Our evaluation shows that we are able to
optimize vehicle configuration sets to meet simulation goals while maintaining real-time performance of the overall simulation.
Published:
EAI SIMUtools 2015,
Athens, Greece, Portland, August 24 - 26, 2015.
Files:
Paper
Slides
Scalable Concurrency Control for Massively Collaborative Virtual Environments
Patrick Lange, Rene Weller, Gabriel Zachmann
We present a novel concurrency control mechanism for collaborative massively parallel virtual environments that allows an arbitrary amount of components to exchange data
with very little synchronisation overhead. The approach taken here is to maintain the shared world state of the complete virtual environment in a global key-value pool. Our
novel method does not use any locking mechanism. Instead it allows wait-free data access for all concurrent components for both, reading and writing operations. This guarantees
a highly responsive low-latency data access while keeping a consistent system state for all users and system components. Nevertheless, our approach is perfectly scalable even
for massive multi-user scenarios. We provide a number of benchmarks in this paper, and the results show an almost
constant run-time, independent of the number of concurrent users. Moreover, our approach outperforms previous
concurrency control systems significantly by more than an order of magnitude.
Published:
ACM Multimedia Systems,
Massively Multiuser Virtual Environments (MMVE) 2015 ,
Portland, United States, March 18 - 20, 2015. [BibTex]
Files:
Paper
Slides
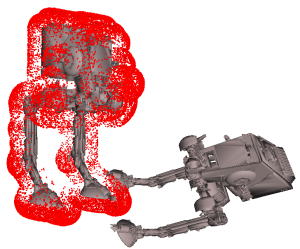
Massively-Parallel Proximity Queries for Point Clouds
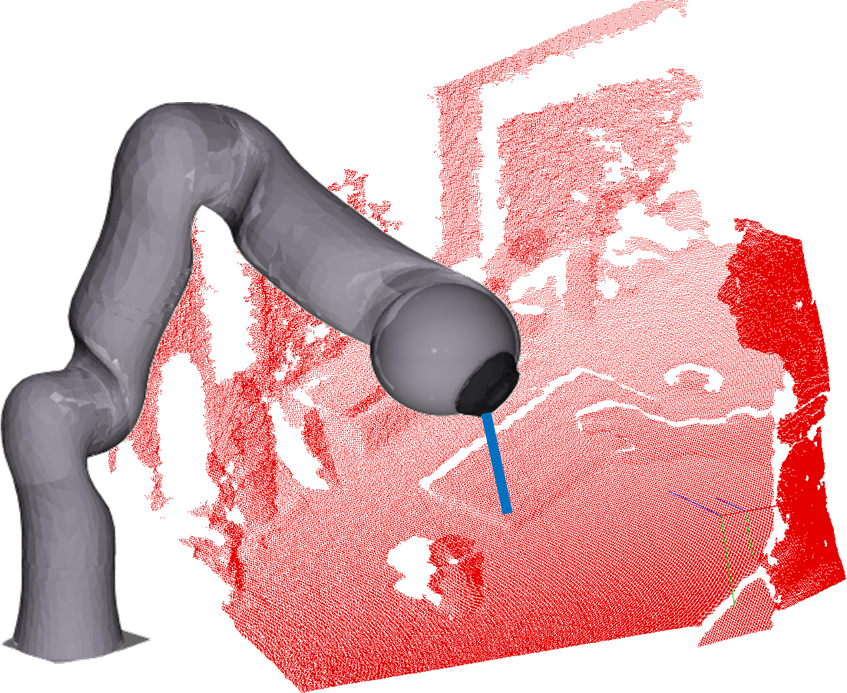
Max Kaluschke, Uwe Zimmermann, Marinus Danzer, Gabriel Zachmann and Rene Weller
We present a novel massively-parallel algorithm that allows real-time distance computations between arbitrary
3D objects and unstructured point cloud data. Our main application scenario is collision avoidance for robots
in highly dynamic environments that are recorded via a Kinect, but our algorithm can be easily generalized for
other applications such as virtual reality. Basically, we represent the 3D object by a bounding volume hierarchy,
therefore we adopted the Inner Sphere Trees data structure, and we process all points of the point cloud in parallel
using GPU optimized traversal algorithms. Additionally, all parallel threads share a common upper bound in the
minimum distance, this leads to a very high culling efficiency. We implemented our algorithm using CUDA and
the results show a real-time performance for online captured point clouds. Our algorithm outperforms previous
CPU-based approaches by more than an order of magnitude.
Published:
11th Workshop on Virtual Reality Interaction and Physical Simulation VRIPHYS (2014),
Bremen, Germany, September 24 - 25, 2014. [BibTex]
Files:
Paper
Slides
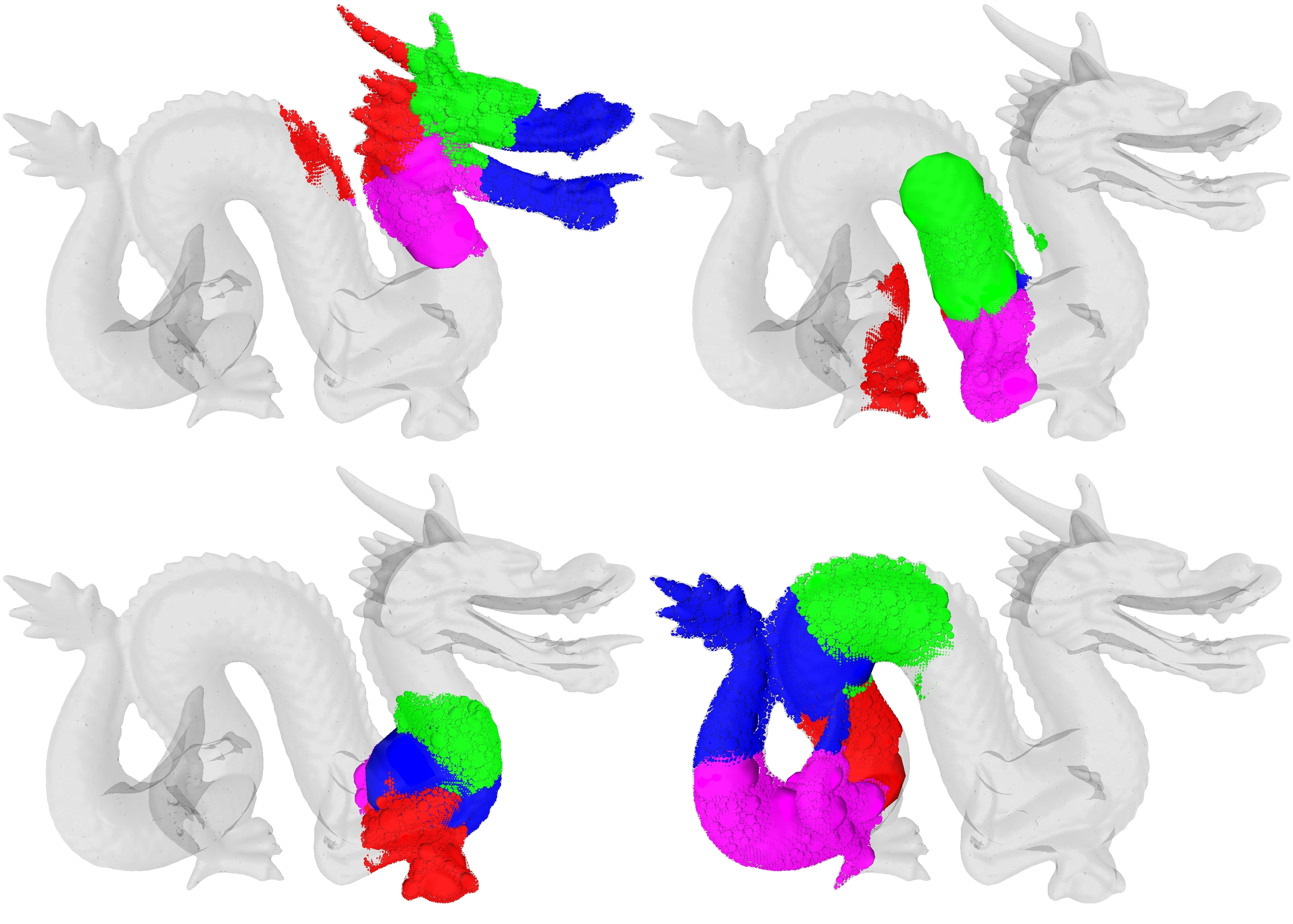
Massively Parallel Batch Neural Gas for Bounding Volume
Hierarchy Construction
Rene Weller, David Mainzer, Abhishek Srinivas, Matthias Teschner and Gabriel Zachmann
Ordinary bounding volume hierarchy (BVH) construction algorithms create BVHs that approximate the boundary
of the objects. In this paper, we present a BVH construction that instead approximates the volume of the objects
with successively finer levels. It is based on Batch Neural Gas (BNG), a clustering algorithm that is known from
machine learning. Additionally, we present a novel massively parallel version of this BNG-based hierarchy construction
that runs completely on the GPU. It reduces the theoretical complexity of the sequential algorithm from
O(nlogn) to O(log2 n) and also our CUDA implementation outperforms the CPU version significantly in practice.
Published:
11th Workshop on Virtual Reality Interaction and Physical Simulation VRIPHYS (2014),
Bremen, Germany, September 24 - 25, 2014. [BibTex]
Files:
Paper
Slides
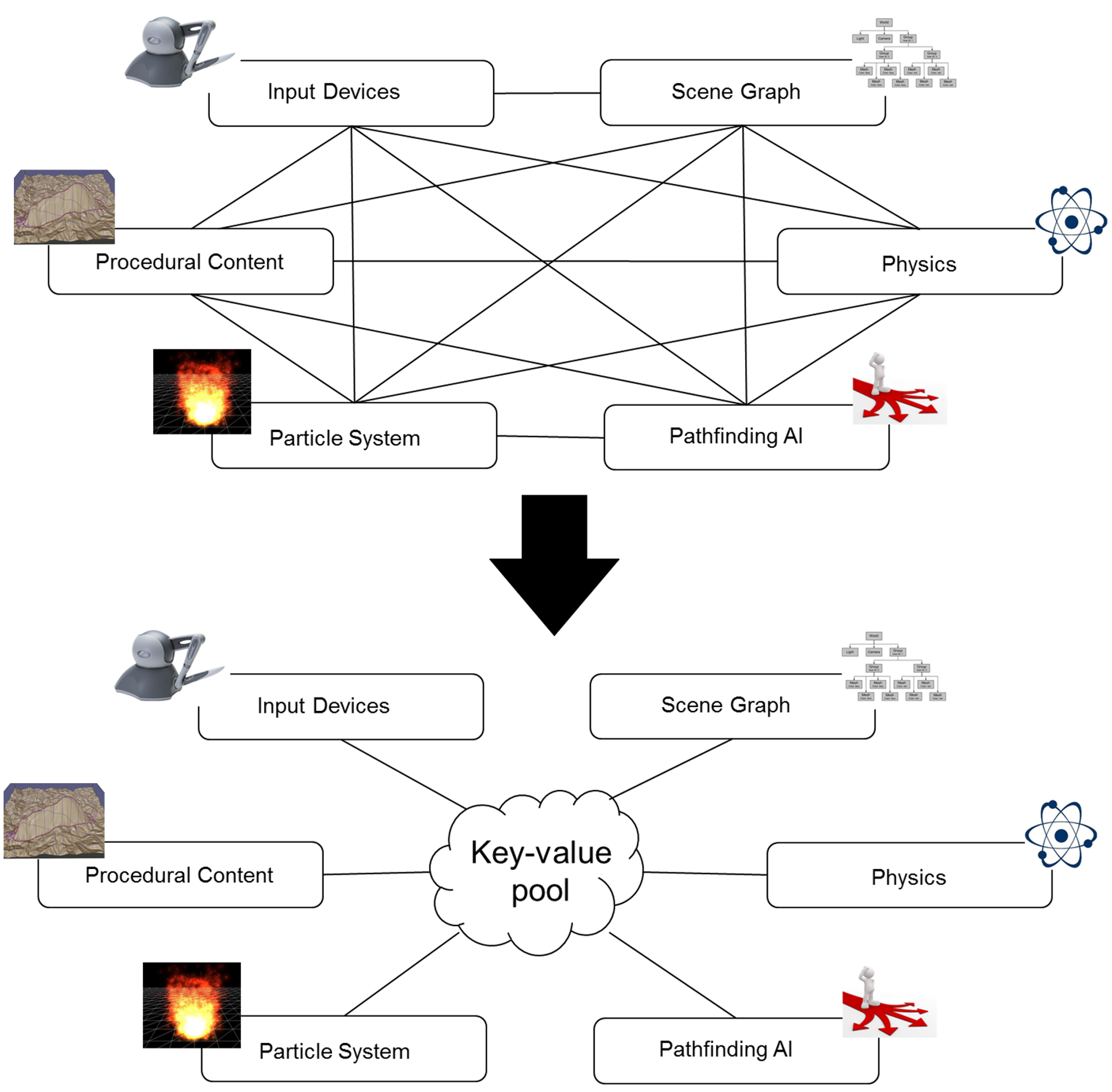
A Framework for Wait-Free Data Exchange in Massively Threaded VR Systems
Patrick Lange, Rene Weller, Gabriel Zachmann
A central part of virtual reality systems and game engines is the generation, management and distribution of all
relevant world states. In modern interactive graphic software systems usually many independent software components
need to communicate and exchange data. Standard approaches suffer the n2 problem because the number
of interfaces grows quadratically with the number of component functionalities. Such many-to-many architectures
quickly become unmaintainable, not to mention latencies of standard concurrency control mechanisms. We present
a novel method to manage concurrent multithreaded access to shared data in virtual environments. Our highly efficient
low-latency and lightweight architecture is based on a new wait-free hash map using key-value pairs. This
allows us to reduce the traditional many-to-many problem to a simple many-to-one approach. Our results show that
our framework outperforms by more than two orders of magnitude standard lock-based but also modern lock-free
methods significantly.
Published:
International Conference in Central Europe on Computer Graphics, Visualization and Computer Vision (WSCG)),
Plzen, Czech Republic, June 2 - 5, 2014. ISBN 978-80-86943-71-8 [BibTex]
Files:
Paper
Slides
Fast Sphere Packings with Adaptive Grids on the GPU
Jörn Teuber, Rene Weller, Gabriel Zachmann, Stefan Guthe
Polydisperse sphere packings are a new and very promising data representation
for several fundamental problems in computer graphics and VR such as collision
detection and deformable object simulation. In this paper we present acceleration techniques
to compute such sphere packings for arbitrary 3D objects efficiently on the GPU.
To do that, we apply different refinement methods for adaptive grids. Our results show
a significant speed-up compared to existing approaches.
Published:
GI VR/AR 2013 (X. Workshop der GI-Fachgruppe VR/AR) Second Place for Best Paper Award [BibTex]
Files:
Paper
Slides
Video
New Geometric Data Structures for Collision Detection
Rene Weller
Finally, it's done - My dissertation.
Published:
Extended Version: Springer Series on Touch and Haptic Systems
[BibTex]
Original Version: Staats- und Universitätsbibliothek Bremen
[BibTex]
Files:
Flyer
Paper
User Performance in Complex Bi-manual Haptic Manipulation
with 3 DOFs vs. 6 DOFs
Rene Weller, Gabriel Zachmann
We present the results of a comprehensive user study that evaluates
the influence of the degrees of freedom on the users' performance
in complex bi-manual haptic interaction tasks. To do that, we have
developed a novel multi-player game that allows the qualitative as
well as the quantitative evaluation of different force-feedback devices
simultaneously. The game closely resembles typical tasks
arising in tele-operation scenarios or virtual assembly simulations;
thus, the results of our user study apply directly to real-world industrial
applications. The game is based on our new haptic workspace
that supports high fidelity, two-handed multi-user interactions in
scenarios containing a large number of dynamically simulated rigid
objects; moreover, it works independent of the objects' polygon
count. The results of our user study show that 6 DOF forcefeedback
devices outperform 3 DOF devices significantly, both in
user perception and in user performance.
Published:
Haptics Symposium 2012
[BibTex]
Files:
Paper (pdf, 2.6MB)
Poster (pdf, 1.6MB)
Eyecatcher (pdf, 0.8MB)
Teaser (pptx, 10.0MB) Best Teaser Award
Links:
Project Homepage
3-DOF vs. 6-DOF -
Playful Evaluation of Complex Haptic Interactions
Rene Weller, Gabriel Zachmann
We present a haptic workspace that allows high fidelity
two-handed multi-user interactions in scenarios containing a large
number of dynamically simulated rigid objects and a polygon count
that is only limited by the capabilities of the graphics card. Based
in this workspace we present a novel multiplayer game that supports
qualitative as well as quantitative evaluation of different haptic devices
in demanding haptic interaction tasks.
Published:
IEEE International Conference on Consumer Electronics (ICCE) 2011
[BibTex]
Files:
Paper (pdf, 0.5MB)
Slides (pptx, 15MB)
Video from Talk: wmv (60MB),
mov (76MB)
Links:
Project Homepage
Inner Sphere Trees and Their Application
to Collision Detection
Rene Weller, Gabriel Zachmann
Collision detection between rigid objects plays an important role in many fields of
robotics and computer graphics, e.g. for path-planning, haptics, physically-based
simulations, and medical applications.
This chapter contributes the following novel ideas to the area of collision detection:
- A novel geometric data structure, the Inner Sphere Trees (IST), that provides
hierarchical bounding volumes from the inside of an object.
- A method to compute a dense sphere packing inside a polygonal object.
- We propose to utilize a clustering algorithm to construct a sphere hierarchy.
- A unified algorithm that can compute for a pair of objects, based on their ISTs,
both an approximate minimal distance and the approximate penetration volume;
the application does not need to know in advance which situation currently exists
between the pair of objects.
- A method to compute forces from the penetration volume that are continuous,
both in direction and value.
Published:
Virtual Realities, Springer, 2011
[BibTex]
Links:
Project Homepage
ProtoSphere: A GPU-Assisted Prototype Guided
Sphere Packing Algorithm for Arbitrary Objects
Rene Weller, Gabriel Zachmann
We present a new algorithm that is able
to efficiently compute a space filling sphere packing for arbitrary
objects. It is independent of the object's representation (polygonal,
NURBS, CSG,...); the only precondition is that it must be possible
to compute the distance from any point to the surface of the object.
Moreover, our algorithm is not restricted to 3D but can be easily
extended to higher dimensions.
The basic idea is very simple and related to prototype based approaches
known from machine learning. This approach directly
leads to a parallel algorithm that we have implemented using CUDA.
As a byproduct, our algorithm yields an approximation of the object's
medial axis that has applications ranging from path-planning
to surface reconstruction.
Published:
Siggraph Asia, Technical Sketches, 2010
[BibTex]
Files:
Paper (pdf, 6MB)
Slides (pptx, 25MB)
Video 1 from Talk (wmv, 30MB)
Video 2 from Talk (wmv, 8MB)
Video 3 from Talk (wmv, 2MB)
Video 4 from Talk (wmv, 5MB)
Video 5 from Talk (wmv, 4MB)
Video 6 from Talk (wmv, 28MB)
Links:
Project Homepage
A Benchmarking Suite for 6-DOF Real Time Collision Response Algorithms
Rene Weller, David Mainzer, Gabriel Zachmann, Mikel Sagardia, Thomas Hulin, Carsten Preusche
A benchmarking suite for rigid object collision detection and collision response schemes. The proposed
benchmarking suite can evaluate both the performance as well as the quality of the collision response.
The former is achieved by densely sampling the configuration space of a large number of highly detailed
objects; the latter is achieved by a novel methodology that comprises a number of models for certain
collision scenarios. With these models, we compare the force and torque signals both in direction and
magnitude.
Our device-independent approach allows objective predictions for physically-based simulations as well
as 6-DOF haptic rendering scenarios. In the results, we show a comprehensive example application of our
benchmarks comparing two quite different algorithms utilizing our proposed benchmarking suite. This proves
empirically that our methodology can become a standard evaluation framework.
Published:
Proceedings of the 17th ACM Symposium on Virtual Reality Software and Technology 2010 (VRST' 2010), Hong Kong, November 2010.
[BibTex]
Files:
Paper (pdf, 2.2MB)
Presentation Slides (pdf, 1.2MB)
Links:
Project Homepage
Stable 6-DOF Haptic Rendering with Inner Sphere Trees
Rene Weller, Gabriel Zachmann
Based on our new geometric data structure, the inner sphere trees,
we present a fast and stable uniform algorithm for proximity and penetration volume queries between watertight objects at haptic rates.
Moreover, we present
a multi-threaded version of the penetration volume computation
for time-critical haptic rendering that is based on separation lists
and the novel notion of expected overlapping volumes. Finally,
we show how to use the penetration volume to compute continuous
contact forces and torques that enable a stable rendering of
6-DOF penalty-based distributed contacts.
Published:
Proceedings of International Design Engineering Technical Conferences & Computers and Information in Engineering Conference (IDETC/CIE),
San Diego, USA, 30 August - 02 September 2009. Virtual Environments and Systems - 2009 Best Paper Award. [BibTex]
Files:
IDETC/CIE Presentation (ppt, 15MB)
Simulation Video wmv, mov
Interaction Video wmv, mov
Bones Video wmv, mov
758 Video wmv, mov
Pin in Hole Benchmark Video wmv, mov
Links:
Project Homepage
A Unified Approach for Physically-Based Simulations and Haptic Rendering
Rene Weller, Gabriel Zachmann
Since the visual feedback and effects of today's games have become
extremely mature, it will be more and more important for games to
provide realistic feedback to other senses, such as our haptic sense.
On the hardware side, this has become possible in recent years by
the advent of first inexpensive haptic devices on the consumer market,
such as the Falcon from Novint. Research on force-feedback
devices and algorithms has been done over 10 years, and has only
fairly recently been introduced to games.
However, while there is a large body of research on how to render
forces given a collision and its contact information, the computation
of the latter for massive models is still a challenge. First of all, this
is due to the much higher effort to compute contact information.
Second, this is due to the update rates that are necessary for haptic
rendering, which need to be much higher than for visual rendering,
i.e., 250-1000 Hz. And third, defining the contact information such
that continuous contact forces can be derived is not always obvious.
Therefore, one of the major challenges in haptic rendering for
games is the computation of continuous forces at haptic rates. A
solution to this challenge can also be utilized to do physically-based
simulation of rigid bodies, which has become increasingly popular
in games over the past few years.
In this paper, we take advantage of the fact that in rendering haptic
forces, as well as in most real-time applications that involve
physically-based simulation, an absolutely correct determination of
the forces acting on the virtual objects is not necessary.
Published:
ACM SIGGRAPH Video Game Proceedings ,
New Orleans, USA, August 2009. [BibTex]
Files:
Siggraph Paper (pdf, 4MB)
Siggraph Presentation (ppt, 25MB)
Simulation Video wmv, mov
Interaction Video wmv, mov
Armadillo Video wmv, mov
Screwdriver Video wmv, mov
Bozzle Video wmv, mov
Links:
Project Homepage
Inner Sphere Trees for Proximity and Penetration Queries
Rene Weller, Gabriel Zachmann
We present a novel geometric data structure for
approximate collision detection at haptic rates between rigid
objects. Our data structure, which we call inner sphere trees,
supports different kinds of queries, namely, proximity queries
and a new method for interpenetration computation, the penetration
volume, which is related to the water displacement of
the overlapping region and, thus, corresponds to a physically
motivated force.
The main idea is to bound objects from the inside with a
set of non-overlapping spheres. Based on such sphere packings, a
"inner bounding volume hierarchy" can be constructed. In order
to do so, we propose to use an AI clustering algorithm, which
we extend and adapt here.
The results show performance at haptic rates both for proximity
and penetration volume queries for models consisting of
hundreds of thousands of polygons.
Published:
2009 Robotics: Science and Systems Conference (RSS),
Seattle, USA, 28 June - 01 July 2009. [BibTex]
Files:
RSS paper (pdf, 6MB),
RSS poster (pdf, 2MB)
Technical Report (pdf, 6MB), [BibTex]
Links:
Project Homepage
A Benchmarking Suite for Static Collision Detection Algorithms
Sven Trenkel, René Weller, Gabriel Zachmann
In this paper, we present a benchmarking suite that allows a systematic comparison of pairwise static collision detection algorithms for rigid objects. The pdf-file contains a slightly extended version of the original published paper.
Published
International Conference in Central Europe on Computer Graphics, Visualization and Computer Vision (WSCG),
Plzen, Czech Republic, January 29 - February 1, 2007.
[BibTex]
Files:
Paper (pdf, 1.0MB)
Slides (pdf, 5.4MB)
Video of configuration generation (avi, 16.6MB)
For further information please visit our project homepage.
Kinetic Separation Lists for Continuous Collision Detection of Deformable Objects
Gabriel Zachmann, René Weller
In this paper, we present a new acceleration scheme for continuous inter- and intra-collision detection of deformable objects. The pdf-file contains a slightly extended version of the original published paper (Section 6.2).
Published
Third Workshop in Virtual Reality Interactions and Physical Simulation (Vriphys),
Madrid, Spain, 6/7 November 2006. [BibTex]
Files:
Paper (pdf, 0.7MB)
Slides (pdf, 4.9MB)
Kinetic Bounding Volume Hierarchies for Deformable Objects
Gabriel Zachmann, René Weller
In this paper, we present novel algorithms for updating bounding volume hierarchies of objects undergoing arbitrary deformations.
Published
ACM Int'l Conf. on Virtual Reality Continuum and Its Applications (VRCIA),
Hong Kong, China, 14-17 June 2006.
[BibTex]
Files:
Paper (pdf, 1MB)
Slides (pdf, 6.0 MB)
Technical Report (pdf, 1.2MB)
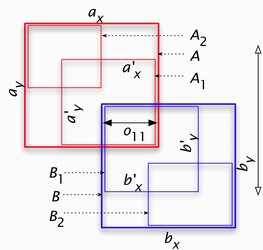
A Model for the Expected Running Time of Collision Detection using AABB Trees
René Weller, Jan Klein, Gabriel Zachmann
In this paper, we propose a model to estimate the expected running time
of hierarchical collision detection that utilizes AABB trees,
which are a frequently used type of bounding volume (BV).
Published
12th Eurographics Symposium on Virtual Environments (EGVE),
Lisbon, Portugal, 8-10 May 2006.
[BibTex]
Files:
Paper, on-screen version (pdf, 1.6 MB)
Paper, print version (pdf, 1.6 MB)
Slides (pdf, 2.5 MB)
[Complete list of all entries in BibTex
format]
|